Robots for Resilient Infrastructure, June 2017, Leeds: Challenge review
Robots for Resilient Infrastructure - An International Robotics Challenge Event
27th & 28th June 2017. Weetwood Hall, Leeds, UK.
‘In the air, on the ground and underground– robots to create, inspect, repair and maintain the physical infrastructure of our everyday lives’
This two day challenge event brought together over 80 academics, industry, policy makers and stakeholders together to explore the future use of robots in the creation, inspection, repair and maintenance of critical infrastructure. The event was run as part of the UK Robotics Week 2017 to showcase the current state-of-the-art of robotics for infrastructure through a packed programme of talks and demonstrations.
The Programme
Keynote talks were given by Prof Hajime Asama (the University of Tokyo) on the use of robot technology for disaster prevention and response; Prof Philip Purnell (University of Leeds) describing the vision of the Self Repairing City project; and Prof Mark Miodownik (UCL) on the challenges of developing materials technologies for self-repairing roads. Attendees also heard from industry, government and academia speakers cutting across the construction, nuclear, local government, energy, and even space and farming sectors. The event was highly successful in bringing together key players from across these diverse areas to talk about developments, applications and future challenges in the use of robotics for resilient infrastructure.
Attendees were also given a teaser for of the new UK RAS White Paper on ‘Robotic and Autonomous Systems for Resilient Infrastructure’, which was formally launched on 30th June at the International Robotics Showcase in London, but is now available for download.
The full programme is available for review on the programme page, and an event overview video is available here.
The Challenge
Ten teams from across the UK came to compete, demonstrating their systems across the two days. The teams were judged on the best technical implementation, the greatest potential for positive impact in infrastructure engineering and also for the best presented video. For teams unable to attend in person, video-only entries were permitted for the best video category. The entries were expertly judged by: Mr Michael Cook (Kier Utilities), Prof David Hogg (University of Leeds), Dr Ana MacIntosh (Sheffield Robotics, University of Sheffield) and Dr Jakob Sprickerhof (Engineering and Physical Science Research Council). Prizes were kindly sponsored by Kier Utilities.
The Challenge Winners were as follows:
Best Technical Implementation
Metamorphic walker, King’s College London
- First Prize: the King’s College London team Zhao Tang, Cheng Peng and Jian Dai won the best technical implementation prize for their metamorphic walker, which could change its configuration to adapt to difficult terrain by imitating different forms of animal locomotion. [video]
- Runner Up: the runner up prize went to the STRANDS project Lucie robot presented by Nick Hawes (University of Birmingham) and Tony Cohn (University of Leeds). Lucie is an intelligent mobile robot designed to run for months in dynamic human environment, monitoring and performing scheduled operations, with uses in real world security and care giving situations. [video]
Greatest Potential for Positive Impact
Shared autonomy, University of Edinburgh
- First Prize: The greatest potential for positive impact prize went to Wolfgang Merkt, Chris Mower, Theodoros Stouraitis (University of Edinburgh) for their grasping and manipulation system which used robust shared autonomy and continuous scene monitoring to enable it to safely adapt to changes in its environment. [video]
- Runner Up: Chang Liu, Peter Turner, Paget Leyton and Stephen Prior, University of Southampton, were awarded runner up prize for their drone designed to perch on street lampposts and install camera to monitor, for example, traffic flow or antisocial behaviour. [video]
Best Video
- First Prize: The prize of best video went to Dennis Hong and Sepehr Ghassemi at UCLA for their entertaining video of the Buoyancy Assisted Lightweight Legged Unit, BALLU.
- Runner Up: Mathew Holloway’s Q-Bot video received the runner up prize. The Q-Bot system installs underfloor foam insulation in old properties improving their energy efficiency without the significant disruption of manual installation.
Other entries included:
- The metahand with a reconfigurable palm by Jie Sun, Xinsheng Zhang, Jian S Dai of King’s College London. [video]
- A mock up of autonomous operation of earthmoving trucks from drones and a 3D printer deployed by drone by Bilal Kaddouh, Jason Liu, Leo Pauly, Shan Luo, Harriet Peel, Raul Fuentes (University of Leeds) [video]
- Automatic emotion detection in group settings by Wenxuan Mou (Queen Mary University of London) [video]
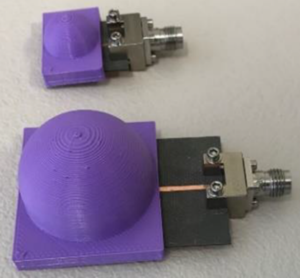
- Wireless power transfer for buried infrastructure inspection by Bilal Kaddouh, Viktor Doychinov, George Mills, Bilal Malik, Ian Robertson (University of Leeds) [video]
- Using Drones to Repair Roads with 3D Printing demonstration (University of Leeds and UCL) [video]
3D printing drone, University of Leeds
Acknowledgements
The challenge was supported by The Engineering and Physical Science Research Council (EPSRC) through the Grand Challenge of “Balancing the impact of City infrastructure engineering on natural systems using robots” & EPSRC investment in capital equipment. It is organised in collaboration with the UK RAS Network and UK Robotics Week. The challenge was also supported by the International Association for Automation and Robotics in Construction (I.A.A.R.C.), Kier and AEROWORKS.
The event was organised as part of the Self Repairing Cities project which aims to tackle the Grand Challenge of Zero disruption from street works in UK cities by 2050 by developing robots that will identify, diagnose and repair street-works through minimally invasive techniques.