Flying asphalt 3D printer gets eyes and legs for autonomous road crack detection and repair.
Asphalt roadways deteriorate due to age and traffic loads. If maintenance is not done in a timely manner distress will aggravate - cracks become potholes, and the potholes become craters. Automated systems used to monitor and repair cracks in the roadway could address the current interest in preserving road infrastructure, with minimal road obstruction.
Self-Repairing cities therefore have developed such a system, combining an unmanned aerial vehicle (UAV) with an integrated asphalt 3D printer for autonomous road crack detection and repair. The printer design is modular and could also be attached to a ground vehicle. The system consists of three main components:
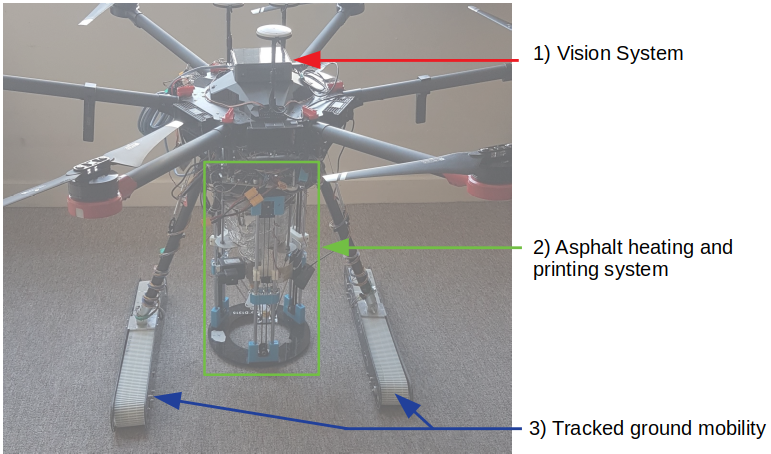
1) Vision system for crack detection and digitization
A camera is fitted on the drone to view the area of road containing a crack. The cracks need to be identified within the camera’s view and digitized into a number of closely spaced points populated along the crack contour. The image coordinates of the crack points are then transformed into world coordinates to drive the 3D printer. The crack detection needs to be robust in terms of recall and precision, meaning that mostly cracks are detected, and only few false positives are obtained. It is also important to minimize the localisation error so the asphalt printer will only fill crack areas without spilling over healthy road regions.
Our work is based on using the publicly available software named CrackIT. This code has favorable traits for our application in terms of noise rejection and reduced false positives. The CrackIT can run in two modes: Pixel-based mode and the block-based mode. The pixel-based approach provides accurate localisation of crack points, but it also provides several false positives. The block-based mode is noise tolerant, but it lacks precision compared to the pixel-based method. Our strategy was to combine these two modes and develop a crack detection method that had both accuracy and precision. This new method was tested on CrackIT’s standard dataset consisting of 48 road pavement crack images. The test resulted in an average reduction of crack localization of 54%, achieved in terms of image measured distances.
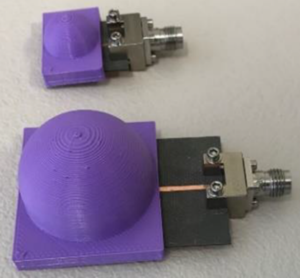
2) Asphalt heating and extruder system
The asphalt is heated in a controlled process and kept at a precise temperature (180°C) using high power electric heaters, and temperature sensors carefully placed in the tank as feedback. This temperature ensures the required asphalt viscosity is maintained while flowing from the tank, through the system piping and extrusion nozzle, and into the crack. The extruder head follows the crack contours in the road by guidance from the detected crack points, transformed into the world coordinate frame. The control of the solenoid valve and the end-effector of the printer must be synchronized to ensure filling of the crack. This work requires a significant part of automation, on the one hand, to maintain the asphalt temperature and, on the other hand, to ensure the accuracy of the crack filling.
3) Ground mobility: tracked system
A tracked mechanism is installed to allow precise motion and positioning for the drone on roads. It uses a continuous flexible belt, reinforced with steel wire, driven by two wheels, and a powerful motor. The mechanism was required to be lightweight and have sufficient torque to deal with higher road gradients. Compared to rubber tyres, tracks distribute the weight of the system over a larger area allowing superior traction, meaning they’re much less likely to slip in adverse conditions. Finally, tracks give higher maneuverability, as it can turn in place by driving the motors in opposite directions.