Wireless power transfer for gas pipe inspection robots
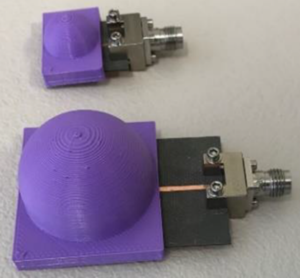
Wireless power transfer in metal pipes is a promising alternative to tethered exploration robots, with strong potential to enable longer operating times. Here we present experimental results for a prototype gas pipe inspection robot with wireless power receiver functionality, designed to fit in and inspect 25.4 mm diameter gas pipes. Details of the robot prototype are given, as well as measurements of the electromagnetic propagation environment within the pipe used for these tests. Finally, a short discussion on the wireless power transmission module performance is included.
Viktor Doychinov, Bilal Kaddouh, George Mills, Bilal Malik, Nutapong Somjit, Ian Robertson (2018) Wireless Power Transfer for Gas Pipe Inspection Robots.
UK-RAS Conference Proceedings 2017, 12 December, Bristol. Journal of Robotics and Autonomous Systems. 1 (1) 80-82. ISSN 2516-5020. Read publication.