Self Repairing Cities incorporates a wide range of projects for solving many urban tasks. The ability to avoid or navigate obstacles is of high importance, especially if the intended surrounds are a public area. Additionally, a robot may need to be able to travel on a variety of different surfaces, like pavement, grass or piping to name but a few. If the robot is required to perform maintenance, the capability to safely interact with the environment is essential.
There are also a number of other disciplines which require similar technology, but in a varying range of environments; from archaeological exploration to subsea tasks. This section shows a collection of robots from Self Repairing Cities, as well as some linked to it in different fields.
Buggy Dropper Drone
- Ability to pick up and drop a buggy to support both air and ground inspection
This eight rotor drone has been developed to have the capability to hold, carry and deploy a remote control buggy, situating it in potentially hard-to-reach or otherwise inaccessible areas. This drone was developed for the UK Robotics Week Infrastructure Challenge, and was showcased at Fawley Power Station, displaying its potential for searching for people in hazardous environments (8m51 - 10m54).
Djedi Robot
- Designed to travel along a channel into inaccessible chamber
- Has drill and camera attachments
The aim of the Djedi project was to expand knowledge of Temple 20 at the Great Pyramid of Giza. It was known that two air shafts lead from the Queens chamber, but robots were required to search these. This robot utilised an inchworm mechanism to climb up the shafts while minimising damage to the pyramid. It was fitted with a borehole drill as well as a snake camera to access further than the reaches of the robot itself.
Collapsible Drone
- Designed for fitting through inch hole and exploring inaccessible areas
- In development
The Collapsible Drone was first created for potential use in archaeological exploration. The drone, having gone through a few variations of design, is able to be pushed through an inch diameter hole. It can then unfold without any human manipulation and explore its surroundings, before folding up again, ready to be retrieved.
Husky
- Mobile platform capable of traversing uneven terrain
- Large payload capable of carrying a wide range of apparatus
The University of Leeds is home to two Clearpath Husky Unmanned Ground Vehicles (Husky UGV). These can travel across uneven terrain at up to 1m/s and can act as a platform for a wide variety of devices, with a payload of up to 75kg, 1.5 times its own weight. This, coupled with an operation time of up to 3 hours, makes the husky ideal for robotics inspection or maintenance in the field. On top of this, they can be adapted to specific jobs. For example, Beanstalk (below left) has been fitted with an extendable mast and support frame, while Centaur (below right) features two Kinova robot arms.

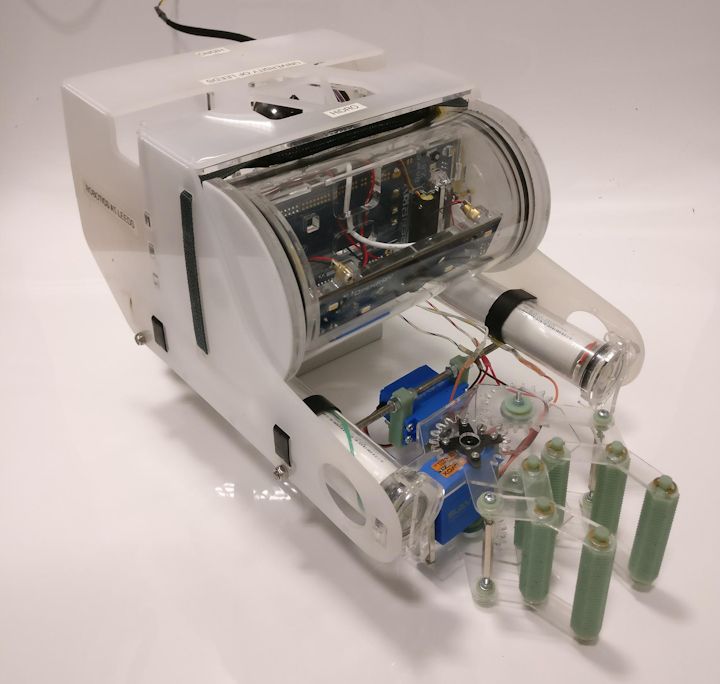
HiDRO
- Small lightweight underwater remotely operated vehicle
- Fitted with small custom grabber for simple manipulation tasks
HiDRO is a modified versions of an OpenROV 2.8 for simple underwater manipulation tasks. The Remotely Operated Vehicle (ROV) is a relatively small size and is fitted with an HD Webcam an LED lighting. This, along with a maximum depth of 100m, means the robot can feedback images from depths much greater than most recreational scuba divers could achieve. Furthermore, HiDRO is fitted with a small custom built grabber to allow it to perform simple manipulation tasks.
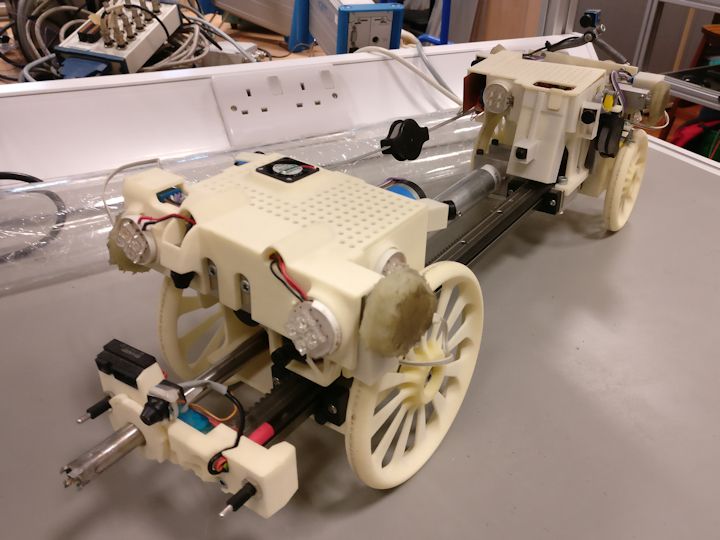
DORAS
- Walking robot designed to walk across flat land and in pipes with leg design
The Deployable Robot Assistant (DORA) has been designed, with specially curved legs, to be able to walk inside a circular cross section pipe, as well as on a wide range of terrains. The DORA is also created as a minimal assembly mechanism, with it being printed on a stratasys objet printer, capable of producing mechanisms in place with little construction. The small size and simple construction make using large groups of these robots at once a feasible possibility.
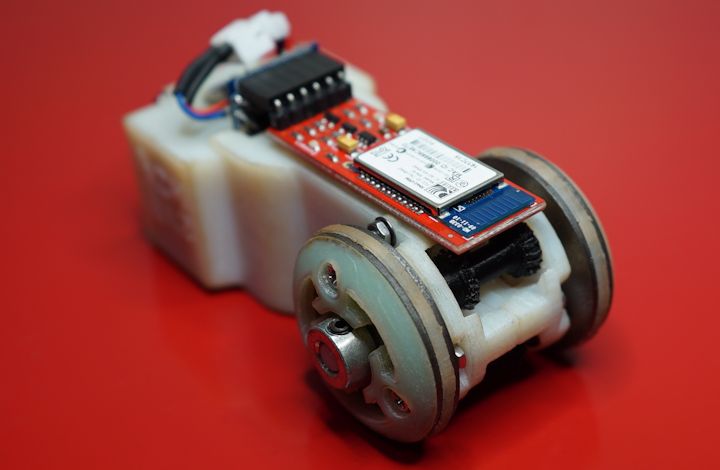
MagnUS
- Able to fit in small drainage pipe
- Magnetic wheels
- Can film from inside pipe
The aim of the Magnetic Utility Robot (MagnUS) is to be able to access aging pipe networks through using smaller pipe systems, as oppose to cutting through the old pipe; a common method to the problem. The MPIR is small and uses magnetic wheels, which allow the robot to travel through small pipes and navigate complex junctions by sticking to its walls. This method of inspection means the older pipe system will only be dug up when absolutely necessary.
Printer Drone
- Drone fitted with small 3D printer, with the aim of being able temporarily repair small pot holes
This is the combination of two pieces of technology to solve a common problem. A multi-rotor drone was fitted with a Delta 3D printer, with the aim of repairing small defects in the road. The robot would be able to land, scan the tarmac and print replacement asphalt to repair the road. The drone has also been fitted with tracks to allow the robot to move to print over larger surface areas. This could hopefully reduce the amount of time and man power to repair damaged roads, an all too common problem in modern life. The following video is from the ‘Robots for Resilience Infrastructure: Robotic Challenge Event‘, where the drone was demonstrated.
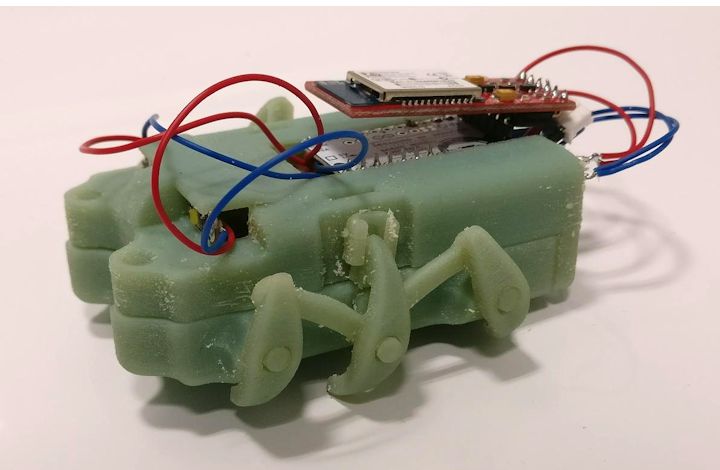
Minebot
- Able to either travel through inch hole, unfold and explore unreachable environments.
Another robot inspired by archaeology, Minebot is another robot designed to fit through small drilled holes, where the space beyond is not accessible. The robot consists of two sets of tracks with a slender body in the middle. These can align to fit through the hole, and then arrange to become a more useful platform with a forward facing camera. While the collapsible drone can fly to be able to view an area from a wider range of positions, Minebot is a better platform for potentially mounting tools, and both could be used in tandem effectively.