Applied system innovation
Editorial introducing a Special Collection of 34 selected papers on the topic of Applied System Innovation from IEEE ICASI 2016 and other high-quality papers that fit the aims and scope of the collection.
3D printing of asphalt and its effect on mechanical properties
Richard J. Jackson, Adam Wojcik, Mark Miodownik This paper describes work to design, build and test an asphalt 3D printer, we believe the first of its kind. Key findings include: 3D printed asphalt is more… Read More
Integrated manufacturing of bespoke mechatronic systems
This book covers the latest advances in materials and structures in manufacturing and processing, including additive and subtractive processes. A key development incorporated within this book is 3D printing, which is being used to produce… Read More
Liquid: The delightful and dangerous substances that flow through our lives
New book by the bestselling scientist and engineer Mark Miodownik on the surprising nature of liquids and how they pervade our modern life. Structured around a plane journey which sees encounters with all manner of liquids… Read More
Optimizing small multi-rotor unmanned aircraft
This design guide was written to capture the author’s practical experience of designing, building and testing multi-rotor drone systems over the past decade. The lack of one single source of useful information meant that the… Read More
Miniature magnetic robots for in-pipe locomotion
A miniature magnetic wall-climbing robot has been developed as a robotic solution for the inspection of 50mm bore diameter pipelines which can scale in-pipe geometry obstacles to access larger connected pipelines.
Hybrid additive manufacture of conformal antennas
This paper presents a new digitally driven manufacturing process chain for the production of high performance, three-dimensional RF devices.
Speech and visual gesture control model for aerobots
This paper describes a model of the multimodal speech and visual gesture (mSVG) control for aerobots operating at higher nCA autonomy levels, within the context of a patrol, search, and rescue application. The developed mSVG… Read More
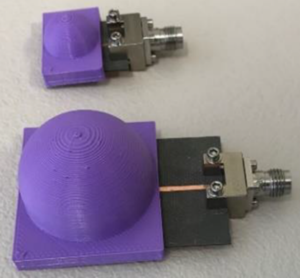
Multi-modal millimeter-wave sensors for plastic polymer material characterization
This paper presents, for the first time, a multimodal sensor for characterizing relative permittivity of plastic polymers by integrating frequency-reconfigurable resonance technique and broadband modified transmission-line technique.
Low-cost microfabrication for MEMS switches and varactors
This paper presents a low-cost micro-fabrication technique for manufacturing RF MEMS switches and varactors without intensive cleanroom environments.
Effect of light and noise on speech and gesture control for aerobots
This paper discusses the research work conducted to quantify the effective range of lighting levels and ambient noise levels in order to inform the design and development of a multimodal speech and visual gesture (mSVG)… Read More
Feature sharing between vision and tactile sensing
Vision and touch are two important sensing modalities for humans and they offer complementary information for sensing the environment. Our aim is to endow robots with a similar multi-modal sensing ability to achieve better perception.… Read More