Wireless power transfer for gas pipe inspection robots
Wireless power transfer in metal pipes is a promising alternative to tethered exploration robots, with strong potential to enable longer operating times. Here we present experimental results for a prototype gas pipe inspection robot with… Read More
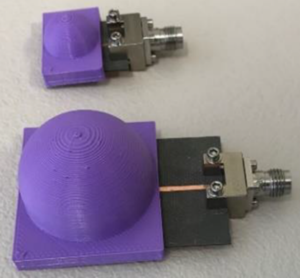
Novel miniaturised sensor for liquid mixtures
This paper reports on a miniaturised lab-on-a-waveguide liquid-mixture sensor, achieving highly accurate nanoliter liquid sample characterization. The nanofluidic-integrated millimeter-wave sensor design is based on a near-field transmission-line technique implemented by a single loop slot antenna… Read More
Briefing on RAS for resilient infrastructure white paper
This paper presents an extended briefing of the recently published UK-Robotics and autonomous systems (RAS) network White Paper in RAS for resilient infrastructure. It aims at setting out a vision of what RAS systems will… Read More
Nematode worm inspired robotic model for pothole detection
Animals navigate complex and varied environments, but often use only limited sensory information. Here we present a simulated robot system using a sensory model and navigation strategy inspired by the nematode worm C. elegans. In particular we… Read More
An interaction method for search & rescue aerobots
This paper is interested in how the increasing leagues of human operators interact with small multi-rotor UAVs. The multimodal speech and visual gesture (mSVG) technique is basically the multimodal combination of speech and visual gesture, a… Read More
Advances in the inspection of unpiggable pipelines
The field of in-pipe robotics covers a vast and varied number of approaches to the inspection of pipelines with robots specialising in pipes ranging anywhere from 10 mm to 1200 mm in diameter. Many of… Read More
Journey to the city of tomorrow: a panel discussion
More than half the world’s population live in cities. Around the globe, urban areas are rapidly growing and changing. How can we ensure that cities work for everyone who lives and works in them? Ford… Read More
Assessing the underworld for next generation infrastructure
Next Generation Infrastructure (NGI) must integrate seamlessly with the existing infrastructure and its systems of operation. It must address the compelling needs of cities and urban systems – it must be sustainable, resilient, adaptable, smart… Read More
Surveying supraglacial ponds using unmanned surface vessel
We used an unmanned surface vessel (USV) to autonomously collect sonar depth measurements for 24 supraglacial ponds to derive the first empirical relationship between their area and volume applicable to the size distribution of ponds… Read More
Deeper networks for pavement crack detection
Pavement crack detection using computer vision techniques has been studied widely over the past several years. However, these techniques have faced several limitations when applied to real world situations due to for example changes of… Read More
An improved robot for bridge inspection
This paper presents a significant improvement from the previous version, presented at ISARC 2016. The robot is now equipped with low-cost cameras and a 2D laser scanner, which is used to monitor and survey a… Read More
White paper on robotics for resilient infrastructure
The environment that infrastructure robotics and automated systems (RAS) are required to operate presents many challenges. For example, robots in cities must cope with the risks created from the complex interaction between large numbers of… Read More